Tutorial <<
Previous Next >> rb
Examples
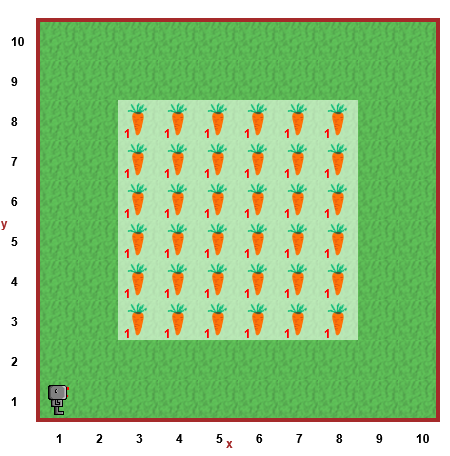
針對 https://mde.tw/reeborg/ 伺服器 world 與 python 解題程式的對應呼叫, 必須從根目錄指向 /reeborg/ 之後再接 world 與 python 程式所在路徑, 如下所示:
https://mde.tw/reeborg/?lang=en&mode=python&menu=/reeborg/worlds/menus/select_collection_en.json&name=Alone&url=/reeborg/worlds/tutorial_en/harvest1.json&editor=/reeborg/python/harvest1.py
接下來希望能選擇性操縱是否列出 menu 超文件頁面.
Alone with the following programs:
# use turn_left() to define turn_right() function
def turn_right():
for i in range(3):
turn_left()
# setup the world by using api functions: https://aroberge.github.io/reeborg-api/
RUR.set_world_size(3, 3)
RUR.add_final_position("house", 3, 1)
RUR.add_wall("east", 1, 1)
# start to go home
turn_left()
move()
turn_right()
move()
turn_right()
move()
turn_left()
move()
Reference: https://aroberge.gitbooks.io/reeborg-s-world-advanced-world-creation/content/
呼叫伺服器 python 目錄中的 harvest1.py:
https://mde.tw/reeborg?lang=en&mode=python&menu=/reeborg/worlds/menus/select_collection_en.json&name=Alone&url=/reeborg/worlds/tutorial_en/harvest1.json&editor=/reeborg/python/harvest1.py
呼叫外部伺服器中的 harvest1.py:
https://mde.tw/reeborg?lang=en&mode=python&menu=/reeborg/worlds/menus/select_collection_en.json&name=Alone&url=/reeborg/worlds/tutorial_en/harvest1.json&editor=https://mdewcm2025.github.io/hw-scrum-1/python/harvest1.py
URL 網址中的變數設定:
lang=en
mode=python
menu=/reeborg/worlds/menus/select_collection_en.json
name=Alone
url=/reeborg/worlds/tutorial_en/harvest1.json
editor=/reeborg/python/harvest1.py
在近端靜態網站中的 reeborg url 變數:
?lang=en&mode=python&menu=/reeborg/worlds/menus/select_collection_en.json&name=Alone&url=/reeborg/worlds/tutorial_en/harvest1.json&editor=https://mdewcm2025.github.io/hw-scrum-1/python/harvest1.py
or
?lang=en&mode=python&menu=/reeborg/worlds/menus/select_collection_en.json&name=Alone&url=/reeborg/worlds/tutorial_en/harvest1.json&editor=/python/harvest1.py
def turn_right():
for i in range(3):
turn_left()
def forward():
while not wall_in_front():
move()
while(1):
forward()
if wall_in_front():
turn_left()
forward()
from library import UsedRobot
# Create two robot instances with different starting positions
robot1 = UsedRobot(1, 1, 'e') # Robot 1 starts at (1, 1) facing east
robot2 = UsedRobot(3, 1, 'e') # Robot 2 starts at (3, 1) facing east
# Move both robots 3 steps east
for _ in range(3):
robot1.move() # Robot 1 takes a step
robot2.move() # Robot 2 takes a step
# Optional: Print a message to indicate completion
print("Both robots have finished moving!")
from library import UsedRobot
# Custom class to track robot position
class TrackedRobot(UsedRobot):
def __init__(self, x, y, orientation):
super().__init__(x, y, orientation)
self.x = x
self.y = y
self.orientation = orientation # 'e', 'n', 'w', 's'
def move(self):
# Update position based on orientation
if self.orientation == 'e':
self.x += 1
elif self.orientation == 'w':
self.x -= 1
elif self.orientation == 'n':
self.y += 1
elif self.orientation == 's':
self.y -= 1
super().move() # Call the parent move method to update the world
def turn_left(self):
# Update orientation
directions = {'e': 'n', 'n': 'w', 'w': 's', 's': 'e'}
self.orientation = directions[self.orientation]
super().turn_left()
def get_position(self):
return (self.x, self.y)
# Create two robot instances
robot1 = TrackedRobot(1, 1, 'e') # Robot 1 starts at (1, 1) facing east
robot2 = TrackedRobot(3, 1, 'e') # Robot 2 starts at (3, 1) facing east
# Move both robots 3 steps east
for _ in range(3):
robot1.move() # Robot 1 takes a step
robot2.move() # Robot 2 takes a step
# Print their final positions
print("Robot 1 final position:", robot1.get_position())
print("Robot 2 final position:", robot2.get_position())
Tutorial <<
Previous Next >> rb